
来源:安博 发布时间:2025-01-28 12:32:36
定位、灵活组网等优点。 HPM6E00_EtherCAT_MDR是求远电子基于HPM6E80精心推出的一套高压伺服EtherCAT从站驱动器方案。依托EtherCAT,作为从站与主站进行高效的数据交互,接收主站下达的各类控制指令,像位置控制指令、速度调节指令以及力矩设定指令等。在高压环境下,其凭借出色的性能,精准驱动高压伺服电机运转,确保电机在高电压工况下依然能实现稳定且精确的位置控制、速度跟随以及力矩输出,为众多对精度和动力要求比较高的应用场景,比如大型数控机床、重型自动化生产线等,提供较为可靠的动力支持与精准的控制保障。该的EtherCAT从站输入输出,支持EtherCAT CIA402协议,支持多种及控制接口。该方案完成度高,用户可快速评估功能,极大的降低产品研究开发难度,缩短产品上市时间。

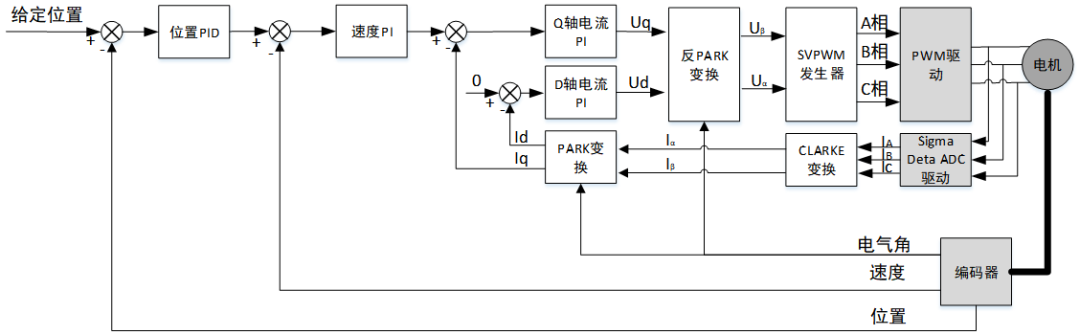
在本方案中,伺服电机采用了先进的FOC三环控制方式,这其中涵盖了极为关键的电流环、速度环以及位置环。通过这三环的协同配合,使得电机可以达成对位置、速度以及力矩的精确控制,从而在各种应用场景中都展现出卓越的性能。与此同时,本方案借助三路sigma-DeltaADC来采集三相电流,它能够以高精度、高频率的方式捕捉电流数据,为后续的控制调节提供较为可靠依据。而且,还运用编码器来采集位置信息,并将其作为反馈内容,通过这样的反馈机制,电机可以实时根据真实的情况进行调整,进而真正的完成精确的位置控制,让总系统运行得更稳定、高效且精准。
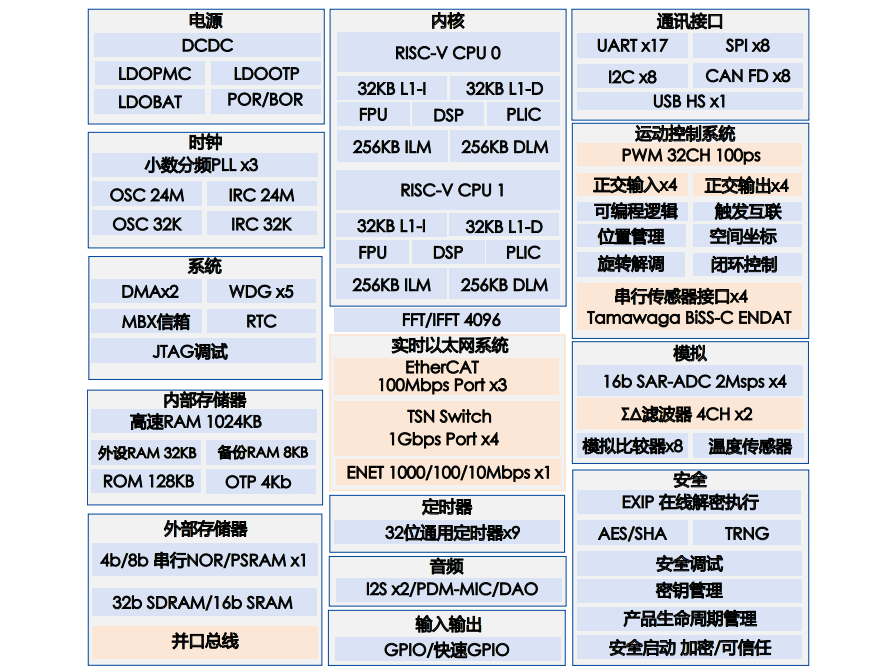
HPM6E00系列MCU是上海先楫推出的一款高性能、高实时以太互联,双RISC-V内核的微控制器。HPM6E00系列提供多达4端口千兆以太交换机,支持时间敏感网络(TSN:Time-Sensitive Networking),并且支持EtherCAT从站控制器(ESC:EtherCAT Slave Controller),以及32路高分辨率PWM输出,Σ∆数字滤波,高精度运动控制管理系统,可以在工业自动化领域实现基于高实时性低延时以太网的高性能伺服电机控制、机器人运动控制等应用。
➢高性能双核RISC-V处理器,主频高达600MHz; ➢片内最大支持2MB SRAM; ➢支持4端口千兆以太网交换机,且支持TSN协议; ➢支持3端口的EtherCAT从站控制器; ➢支持4个高分辨率PWM模块(32通道),调制精度高达100ps; ➢支持4个编码器接口,支持脉冲式与绝对值式位置传感器,2个旋变解码器; ➢支持运动管理控制器、坐标变换器和环路计算器以及可编程逻辑模块PLB; ➢支持4个高性能ADC,16位/2MSPS(或12位/4MSPS),最大32路模拟输入引脚; ➢支持2个Σ∆数字滤波SDM;
文章出处:【微信号:立功科技,微信公众号:立功科技】欢迎添加关注!文章转载请注明出处。
IVM1 这颗芯片来采集CAN总线上的数据,并把这一些数据存下来,记录在SD卡或eMMC中,但我看了一下这个芯片手册,发现没SDXC接口,那我应该如何去做才可以把采集的大量数据给记录下来?
了系统的维护成本,实现智能化生产,是现代工业自动化系统中不可或缺的关键组成部分。 国产高性能微控制
服务商——上海先楫半导体科技有限公司(先楫半导体,HPMicro)研制的
没有使能的问题可能会导致整个自动化系统无法正常工作。未解决这个问题,我们需要从多个方面进行分析和排查。
电机是两个不可或缺的关键组件。它们各自扮演着不同的角色,共同构成了高精度的运动控制管理系统。本文将详细探讨
基于MCX N和MCX A系列微控制器,NXP宣布推出无线多协议MCX W系列
解析汽车抛负载Load Dump:load dump产生原因与TVS并联保护方案
【ELF 2学习板试用】命令行功能测试-shell脚本进行IO控制-灯闪
版权所有:安博 粤ICP备20005664号
友情链接:安博电竞官方下载