中国制造 2025 是中国政府实施制造强国战略的第一个十年行动纲领,是全方面提升中国制造业发展质量和水平的重大战略部署,其中精确指出了围绕创新技术的主体地位。目前技术已大范围的应用在汽车加工、食物分拣、自动化生产装配等领域。工业现场作为一种硬件平台,用于数字图像处理,具有速度快、集成度高、可靠性强等优点。为了更好的提高图像的质量和增强系统处理图像的实时性,本文提出了一种伊瑟特的六自由度机器人视觉伺服,将摄像头集成到基于 Zynq的伊瑟特主站上,提高了视觉伺服的实时性.经测试,该平台能够对视觉
本文针对基于机器视觉的工业机器人进行研究,主要工作包括以下几点: (1)设计了基于 伊瑟特的六自由度机器人视觉伺服控制管理系统总体方案。以 ESR6B机器人、Zynq和摄像头为硬件基础,搭建了六自由度机器人视觉平台。 (2)设计了基于 FPGA的视觉检验测试方案。利用 西林提供的 HLS和 CV库对从摄像头采集到的像素流进行实时处理,并设计了一套识别物块坐标位置的程序流程,便于 伊瑟特主站实时地读取物块坐标值,处理后的图像通过输出到显示屏。 (3)完成了 伊瑟特对伺服的位置控制。利用 Zynq的 Pl层进行了伊瑟特以太网帧的收发和主站时钟的校准,在 PS层运行 苏姆的裸机程序, 并将六自由度串联机器人逆解算法移植到主站代码里,进行机器人末端位置对于视觉反馈的实时跟随控制。 (4)通过实验验证了本设计的对物块识别的准确性和实时性,并使用自主研发的六自由度串联机器人进行实际的运动控制实验。实验证明,机器人能实时地跟随屏幕上显示的物块运动。
本设计难点在于怎么样提高视觉检测的实时性和机器人运动控制的实时性,创新地采用了Xilinx的 Zynq异构处理器,将 FPGA作为视觉处理的主要单元,并将 伊瑟特主站移植到 Zynq平台,这样,在一块芯片里就完成了实时的视觉检测和运动控制.本设计采用 HLS进行视觉处理,对代码进行了优化,使得整个视觉处理模块的延时仅为 18.6ms。同时,在通信方面,本设计使用 FPGA进行 伊瑟特帧的收发和校验,使得 直流电同步周期抖动稳定在小于 1U时间.实时的视觉检测和运动控制在工业机器人视觉伺服中有着广阔的应用,本实验将集成摄像头的 伊瑟特主站应用在自主研发的六自由度串联机器人上,将机器人运动学算法编写入 伊瑟特主站,使得机器人能随着摄像头检测到的物体做实时的运动.实验根据结果得出,本设计的实时性远大于 pc平台的视觉处理,并完成了沿机器人 X 轴方向的实时视觉跟随运动.
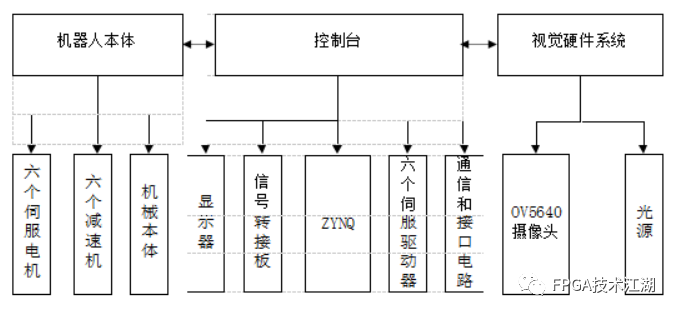
1.ESR6B机器人硬件系统模块设计ESR6B机器人是自主研发的机器人,是典型的多自由度串联机器人 基于视觉引导的机器人硬件系统主要由机器人本体、控制台、Zynq和视觉硬件等组成,如图 2-2 所示。
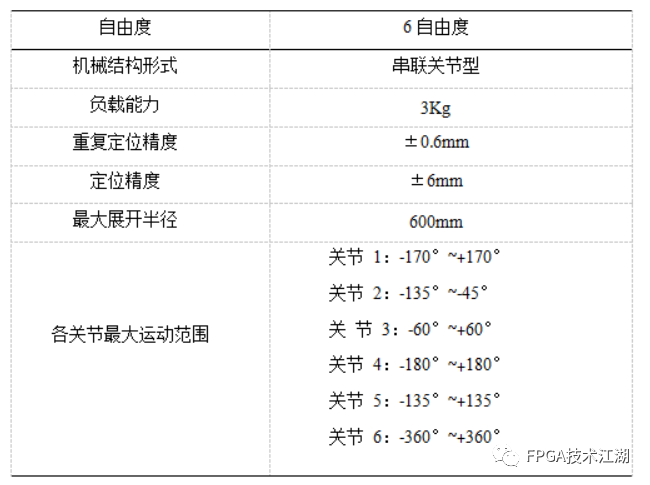
机器人有 6 个自由度,其主要技术参数包括自由度、负载能力、重复定位精度、定位精度以及工作空间等,这些参数是反映机器人性能优劣的主要指标。ESR6B 机器人的基本技术参数如表 2-1 所示。 表 2-1 ESR6B 机器人基本技术参数
机器人视觉系统的硬件选择直接影响图像采集,图像的质量和后期的处理,并影响整个控制管理系统的实时性,所以应根据要求和这些硬件性能,严格选择硬件。基于伊瑟特的六自由度机器人视觉伺服控制管理系统最重要的包含摄像头、Zynq、存储、显示、通信等模块。 Zynq是 Xilinx 设计的一种包含 FPGA+ARM的异构芯片,在 Zynq系统芯片中,包含了基于 艾尔M 的处理系统(PS)和可编程逻辑单元(PL)。伊瑟特主站和运行在PS端,图像算法在 FPGA进行硬件加速,放在Pl端。通过阿希总线互联技术将 FPGA与手臂整合在一起,从而充分的发挥出两种器件结构的优势。 摄像头的主要特性参数有:分辨率、帧率和色彩空间等.依据这一些特性参数, 选择满足实验需求的摄像头。本系统模块设计中,选取型号为 OV 5640的 CMOS类型数字图像传感器,该传感器支持输出最大为 500 万像素的图像 (2592x1944)分辨率) 、支持使用 VGA时序输出图像数据,输出图像的数据格式支持YUV(422/420)、YCbCr 422、RGB 565以及 JPEG格式,本次设计采用 RGB 565格式数据读取。

图 2-3 OV 5640摄像头 本设计中,图像数据由 OV 5640摄像头采集,然后由 FPGA对其进行图像预处理和坐标检测,数据流经 V3内存,然后再通过HP0返回,经过 VDMA、最后通过 HDMI接口输出。 光源的主要参数有:对比度、亮度、表面纹理和光源均匀性。根据上述光源的特性,选择上海东冠

图 2-4 环形光源实物图 基于伊瑟特的六自由度机器人视觉伺服控制管理系统如图 2-5 所示。
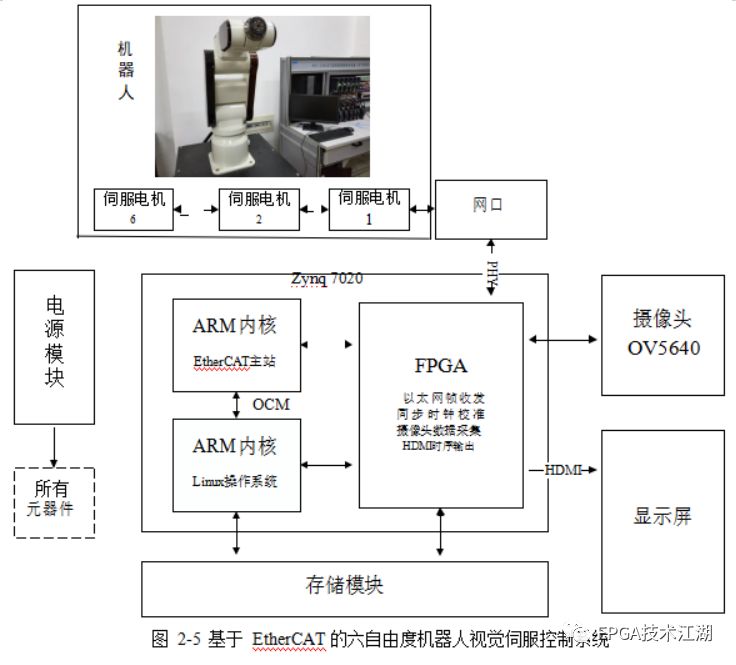
视觉伺服性能分析视觉伺服要求从对目标的识别到控制之间的延时要很短,才能体现控制的实时性.本文设计了一组对照实验,方案一为采用在 Zynq 板上集成摄像头的伊瑟特主站,方案二为pc机连接USB摄像头,并采用广告将坐标数据传输给 TwinCAT主站的方案.两种方案使用相同的图像处理算法,主站都处于CSP模式下。
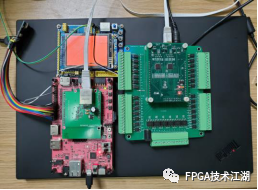
图 4-5 性能测试平台 延时计算平台为STM 32+TFT彩屏和基于XMC 4300的伊瑟特步进从站, 当屏幕开始刷新红色时,定时器开始计时,当接收到步进从站的脉冲时停止计时, 对比方案一和方案二的延时(单位 我们),如图 4-6 所示。
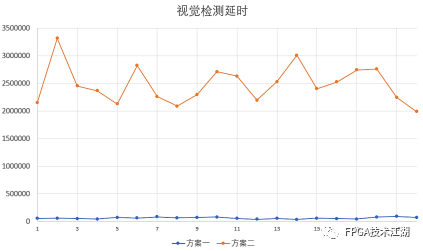
图 4-6 方案对照 能够准确的看出本设计的检测延时平均仅为58毫秒,而方案二却长达 2.48s,在运行相同图像检测算法情况下,FPGA的延时更低,同时由于本设计将摄像头直接集成到主站板上,图像传输延时更低,成本更低。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。举报投诉

仅能在严格定义的结构化环境中执行预定指令动作,缺乏对环境的感知与应变能力,这极大地限制了
功能从客观事物的图像中提取信息,做处理并加以理解,最终用于实际检验测试、测量和
器)它应该有一个 ARM。(显然是用来装东西的)它应该有一个运动的驱动机制。(像
导向等方面的工作,特别是在那些需要重复、迅速的从图象中获取精确信息的场合。
系统,着重关注于运动学算法和轨迹规划算法的实现和测试。LabVIEW作为一个关键技术,在项目中扮演了核心角色
,并且可以方便地连接到不同的传感器和执行器上。NI提供了多种嵌入式硬件平台,以满足复杂系统的需求。从尖端的
组合,实现对高速传输线上的不同物料进行快速的检测、组装。为了方便实训教学,系统来进行了专门的设计,能够实现各类
对不同物料进行快速的检测、组装。为了方便实训教学,系统来进行了专门的设计,能够实现各类
系统进行编程,改变其输入变量来降低或者消除误差,由于这种方法使用的是自身的
,前期确定整体结构的设计,然后组装舵机,用固定的动作组(开环)模拟蜘蛛步态。后期设计算法(闭环)使
【HarmonyOS HiSpark AI Camera】渔业卫士-基于图像识别的多
试用计划:1、申请理由希望早日接触、应用国产的鸿蒙系统。2、项目名称渔业卫士-基于图像识别的多
申请理由:项目描述:因为目前是在使用机智云的Arduino UNO R3的
,所以也拥有比较良好的执行能力,对于复杂的非结构环境,有良好的适应能力。以往的
,所以也拥有比较良好的执行能力,对于复杂的非结构环境,有良好的适应能力。以往的
,所以也拥有比较良好的执行能力,对于复杂的非结构环境,有良好的适应能力。以往的
,四条腿上都搭配了足底传感器。其他零件由3D打印和现成的零件构成,能做出重量轻且低成本的
器具有高扭力、高转速、高稳定、反应灵敏、无抖动、转动角度大、耐冲击等优点。有的人形
` 本帖最后由 大连云港 于 2015-1-19 11:02 编辑 工业
,由两个舵机驱动,能实现两种步态行走。配有三个超声波,实现大角度智能避障。标准演示程序有5个可爱的表演动作。重要技术点: 四足
,运动学部分从坐标变换人手,介绍了正向运动学方程的建立、逆向运动学的求解以及
坐标系Y轴运动,所以速度空间是一个矩形平面,效果如图 4.1(a)所示;而基于上述分析可知,全向轮平台有3个
引导、碰撞检测等功能。如果在一个狭小的空间内工作,而且需要机械臂反复扭曲反转,这七轴的
运动,完成几乎任何角度和轨迹的运动作业,而更多的关节意味着它可以从任意角度拿取工件,而不像单轴
` 本帖最后由 3010203109 于 2013-11-14 18:09 编辑 啤酒生产线介绍:机械手抓瓶视频:啤酒生产线
性能的同时保证,才能在极短的时间内准确寻找到火源并灭火回家。在此以ARM9处理器为核心,对基于嵌入式系统的智能灭火
;2)重复定位精度:±0.01mm;3)能够承担重量的能力:3kg;4)水平到达距离: ≥580mm;5)重量: ≥27kg;6)各轴运动范围J1轴≥±180J2轴≥-155°/+5°J3轴≥-25°/+240°J4轴≥±180°J5
的产业链分为上游核心零部件,中游本体和传感器等生产,以及下游的系统集成等。核心零部件是减速机、
进行工作,还能进入人们的日常生活提供服务,甚至成为人类的朋友。在工业
导航,前置超声波传感器对料块进行方向和距离定位,安装在手爪的颜色传感器识别料块颜色进行分类,三
已经走到行业的前沿, 他们的主要特征是能够安全地协助人类工作。在网上有很多人谈论它们,但你认线
1.2 研究意义1.2.1景区垃圾清理1.2.2核废料处理1.2.3抢险救援1.3
系统中一个重要的子系统,也慢慢变得受到人们的重视。它涉及了图像处理、模式识别和
电机等组成。作为运动框架和载体的重载铝型材其截面形状通过有限元分析法来优化设计,生产中的精益求精确保其强度和直线
走一定距离会走偏,要求走四米的直线,偏差不能超过五厘米,而且还要转弯后继续走直线,请问有什么比较好用的传感器能既节约时机又可以让行走偏差缩小。
(A4988 和兼容)。它还支持多达 8 个末端停止器(每个电机 1 个)和一个 pwm 输出来
已经开始接管人类的部分工作,例如快递、工厂作业、餐厅服务员甚至媒体编辑---就聘请了一位
装置,不但可以确保产品质量,还可以大幅度提高生产效率。据工信部多个方面数据显示,“十三五”期间我国工业
足昆虫的仿生模拟。头部有三个超声波,实现大角度范围的避障。重要技术点:
足昆虫的仿生模拟。头部有三个超声波,实现大角度范围的避障。重要技术点:
工作半径达到1508mm,是目前市场上负载3kg以上臂展最大的智能协作
。工作半径达到1010mm,因此它可以在不同操作区域之间距离较大的设施中执行
,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。 采用自主设计的RJS系列关节模组,既轻便灵活、运行平滑柔顺,同时满足负荷的需求
驱动器,上限功率可达 1000W。通过EtherCAT/CANopen
,能够胜任10KG的有效负载的自动化任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动化、汽车、3C、医疗、电力、科研、教育等多个行业、多场景的自动化需求。-
,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。 采用自主设计的RJS系列关节模组,既轻便灵活、运行平滑柔顺,同时满足负荷的需求
,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。 采用自主设计的RJS系列关节模组,既轻便灵活、运行平滑柔顺,同时满足
驱动器,上限功率可达 1000W。通过EtherCAT/CANopen 总线
激光自动精准跟踪测量仪是高精度、便携式的空间大尺寸坐标测量机,是同时具高精度(μm级)、大工作空间(百米级)的高性能光电测量仪器,被大范围的应用在飞机、汽车、船舶、航天、
激光自动精准跟踪测量关键技术的项目综合绩效评价会议在深圳顺利召开。本项目瞄准我国航空航天、汽车船舶、轨道交通、